aRMoRS - Robotic Medical Rescue Squad
aRMoRS – Robotic Medical Rescue Squad is a project carried out by members of the .NET Student Science Club of the Lodz University of Technology, the aim of which is to develop and manufacture a set of multifunctional modular robots with a control panel. They will support rescue services in action at the sites of accidents and disasters. Their tasks will be, among others, location, and identification of injured people in places that are difficult to access or dangerous for the rescuer, monitoring their health condition, and transport, with the additional functionality of supporting heavy objects or structural elements.
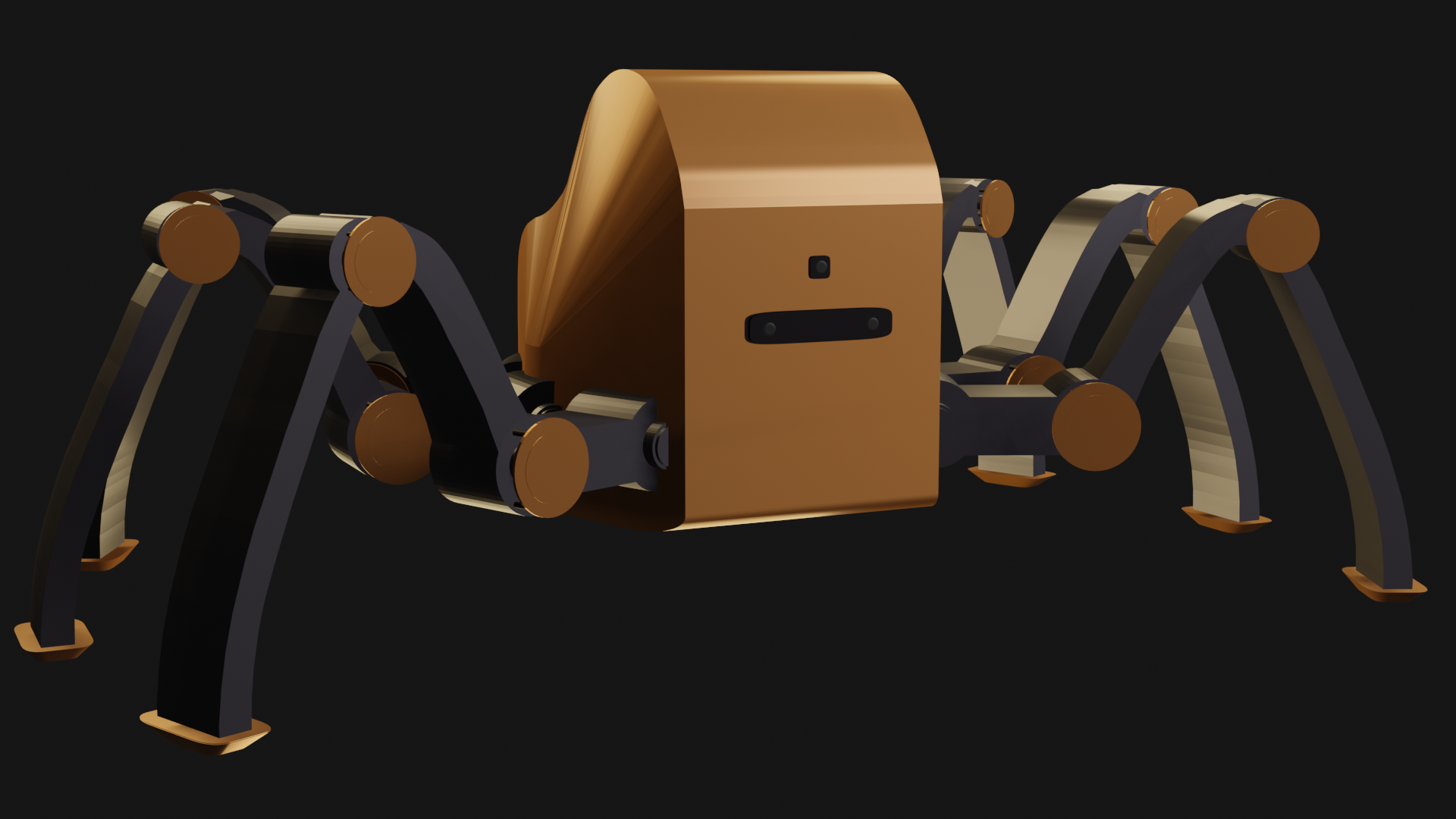
Initially, the project creates two groups of robots. The first group will consist of vision robots that are hexapods. These robots will be powered by 6 mechanical carbon fibre legs, made in 3D printing technology, with 3 degrees of freedom, allowing a lifting capacity of up to 5 kg, controlled by a communication module developed by our team connected to an Nvidia Jetson computer on board. An additional task of the system will be the implementation of all calculations related to the robot training process, essential for the autonomous control mode of a set of robots. Each robot in this group will be equipped with a ZED2 camera, a thermal imaging camera and numerous sensors including distance, carbon monoxide, methane and CO2 sensors, temperature sensors and a barometer. The task of this group will be to map the area of operations, identify potential threats to robots and rescuers, search and identify potential victims, and, in the future, contact them using the planned module for communication with the victims. Thanks to the smallest possible size, the robots from the first group will enable reaching places inaccessible to the rescuer. The tasks of these robots also include the management of the communication network of the set, thanks to which the constant communication of the rescuer with the robots will be ensured.
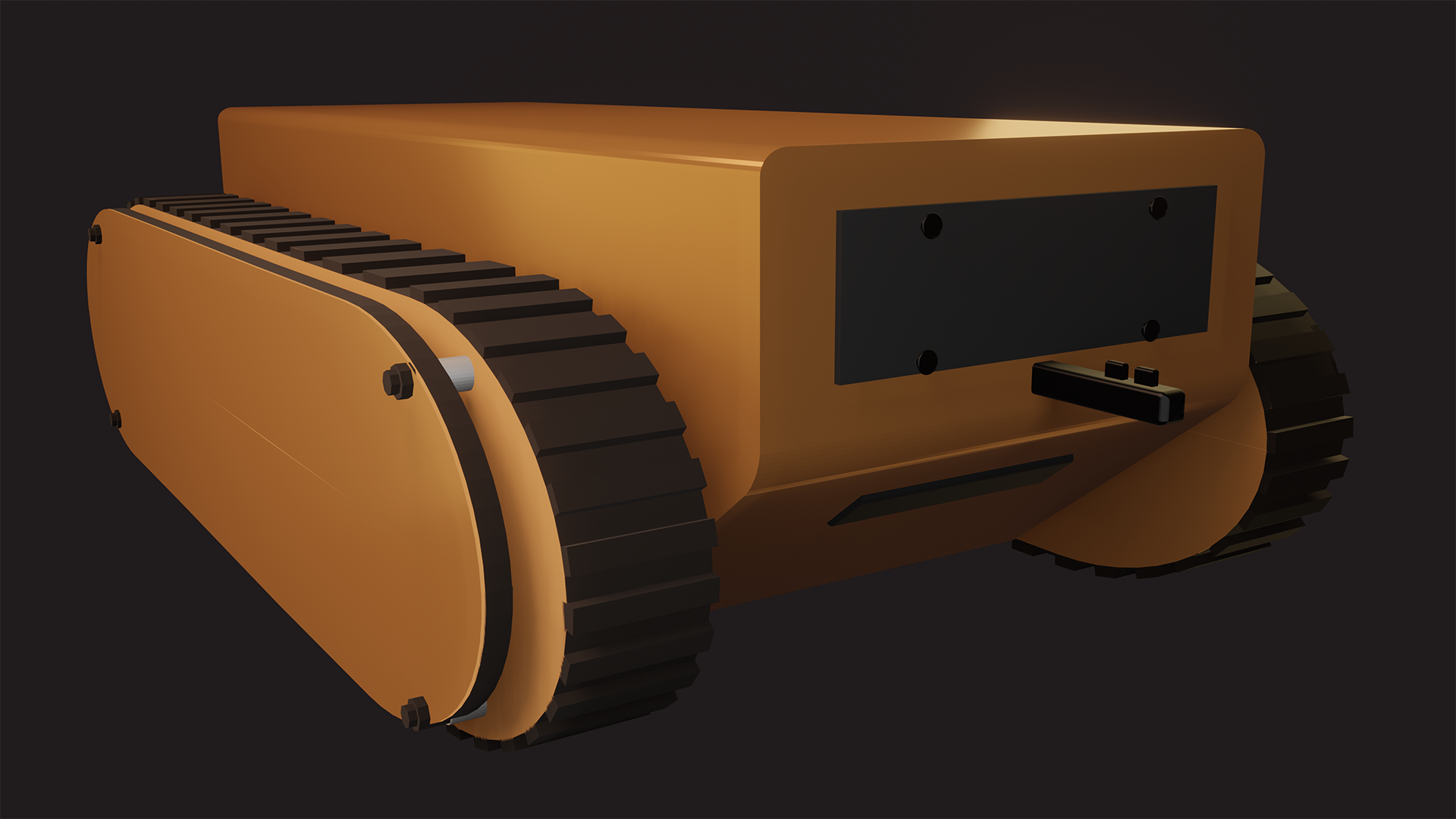
The second group of robots will consist of robots with a tracked running gear. They will be adapted to carry larger loads, e.g., people injured in accidents, which will be directly possible thanks to their construction. The robots from the second group will be able to connect vertically and horizontally, which will enable the set to carry out unusual for currently produced mobile robots, e.g., transporting stretchers and other elements needed during the operation of the mobile platform and supporting the structure elements.
Prototypes and their functionality are widely consulted, moreover, we conduct consultations with the academic community and among emergency services employees. After initial consultation, the project is understood as necessary, and further cooperation will allow us to, e.g., examining the functionality of the control panel interface and developing solutions. aRMoRS is an extensive project that can be developed over many years. It is the basis for the creation of many diploma theses and scientific publications, especially in the field of automation and robot control theory, artificial intelligence, image recognition and machine construction. Further activities in the project assume the performance of research work towards the developed robot control algorithms, as well as the design of drive systems. In addition, the following parameters will be analysed: resistance to load or mechanical damage, efficiency of movement mechanisms, scope and quality of communication, effectiveness of the control system, and the overall functioning of the software. We will also subject these parameters to laboratory and field tests, thanks to which we will be able to develop a safe solution that serves society. The work carried out will lead to the development of articles in the disciplines of automation, electronics, and electrical engineering as well as technical information technology and telecommunications.
The team’s work so far has allowed the development of robots, a control panel and a robotic charging station, preparation of a prototype of the control panel interface, and design of a robot communication module. The first visualization of robots and preliminary designs of elements to be printed in 3D technology were also developed. The group’s work also focused on designing robots for electronics. Object detection and robot control algorithms are also under development, which will initially be tested on control system models developed in Matlab Simulink. Our further activities require the purchase of the electronic components and materials for 3D printing listed in this estimate.
Additionally, after the completion of the currently planned activities, the project envisages extending the set of e.g., for the development of a drone that performs the functions of a robot from the first group, as well as enriching the robots of the first group with a communication module with the victims and rescuers. We are also planning cooperation with the economic community in the Lodz region, which will allow us to further develop the project.
Currently, a team of nearly 40 students from many faculties of the Lodz University of Technology is working on the project. Despite starting the project remotely, we managed to build a very strong and well-coordinated team. Due to the great interest in the subject of the project, the team’s actions and progress can be observed on our social media, where, thanks to the involvement of the student community, we have already reached over 10,000 recipients under our posts:
- Facebook: @TULaRMoRS
- Twitter: @aRMoRS_TUL
and in other media, including at the Studenckie Radio ŻAK, Local Coworking, where we give interviews and share our actions, encouraging others to cooperate.