Realizowana grupa robotów mobilnych działać ma na miejscach wypadków i katastrof, dlatego też niezbędne jest opracowanie możliwie szybkiej i niezawodnej metody komunikacji między elementami grupy. Przygotowane sieci komunikacji muszą przesyłać informacje w dogodnym dla wszystkich elementów grupy formacie. W przypadku komunikacji potrzebnej do wykonywania zleconych zadań i ustalenia położenia robotów, takim formatem są pliki o rozszerzeniu .JSON.
Po analizie potrzeb komunikacyjnych w projekcie przygotowane zostały dwie sieci, działające wymiennie z możliwością jednoczesnego działania. Wszystkie elementy składowe grupy robotów otrzymały moduły XBee 802.15.4 Seria 3 oraz Huawei GSM E3531 USB, które zostały odpowiednio skonfigurowane, aby mogły pełnić określone role w sieci.
Oba moduły komunikacyjne podłączone zostały do komputera Raspberry Pi 3B+, który przekazuje opracowane pliki o rozszerzeniu .JSON z i do komputera pokładowego robota. Opracowane rozwiązanie pozwala na ustalenie priorytetów zadań realizowanych w układzie robotach, umożliwiając czasowe zatrzymanie analizy sygnałów pochodzących z komunikacji na rzecz m.in. uczenia przyrostowego modelu lub analizy otrzymanych rozkazów. Dodatkową zaletą przedstawionego połączenia jest możliwość strumieniowania obrazu z pominięciem jednostki centralnej, ze względu na podłączenie kamer bezpośrednio do Raspberry Pi 3B+. Dzisiaj rozwiniemy kwestię sieci XBee, a o sieci GSM będziecie mogli przeczytać w kolejnych artykułach.
Moduł XBee wybrany został na podstawie kryterium zasięgu, który pozwala na przesyłanie danych do 1 200 m w polu widzenia. Moduły typu Zigbee i XBee oferują również architekturę sieci umożliwiającą wydłużenie tego zasięgu przez kolejne urządzenia, dzięki czemu faktyczny zasięg w polu widzenia w omawianej grupie robotów, uwzględniając założone marginesy oraz architekturę sieci, dla sieci XBee to ponad 9 000 m. Do działania moduł ten nie wymaga zasięgu nadajników radiowych, a jedynie zasilania, dlatego też dobrze sprawdzi się jako forma awaryjnej komunikacji w naszym projekcie.

Źródło: https://botland.com.pl/moduly-glowne-xbee/14447-modul-xbee-802154-ble-seria-3-antena-ufl-sparkfun-wrl-15128.html
Moduł XBee 802.15.4 Serii 3 to moduł służący do komunikacji radiowej najczęściej stosowany w urządzeniach inteligentnych budynków. Moduł ten po zasileniu komunikuje się z każdym odpowiednio skonfigurowanym modułem z tej samej sieci. Do konfiguracji modułów wykorzystywany jest program XCTU, który pozwala na utworzenie własnej sieci i ustalanie hierarchii modułów.
Moduły w sieci XBee mogą przyjąć jedną z trzech funkcji: koordynatora, routera i urządzenia końcowego. W omawianym projekcie zastosowano układ sieci gwiazdowej, w której znajduje się jeden koordynator, który komunikuje się z modułami routerami. Routerami w projekcie są zarówno roboty, jak i panel sterowania. Do robotów-routerów podłączone są roboty będące urządzeniami końcowymi, a panel sterowania nie posiada podłączonych urządzeń końcowych.
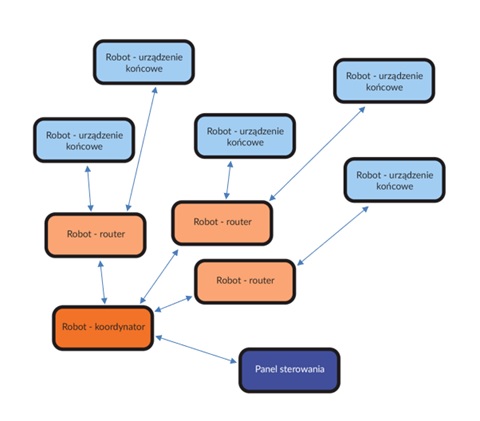
Przedstawiony schemat sieci pozwala na komunikację między dowolnymi robotami z jednoczesnym przekazywaniem kopii informacji do baz danych opracowanych w ramach panelu sterowania.
W omawianym projekcie moduły XBee połączone zostały w sieci gwiazdowej, która w połączeniu ze specyfiką modułów umożliwia przekazywanie informacji z i do każdego urządzenia w sieci. Panel sterowania w tej sieci zrealizowany został jako urządzenie typu router bez podłączonych do niego urządzeń końcowych. Bezpośrednie połączenie z koordynatorem pozwala na realizację zadania nasłuchiwania ruchu w sieci bez jej nadmiernego obciążania, co jest kluczowe szczególnie w momencie wykrycia problemów z komunikacją i przełączenia z komunikacji GSM na XBee.
Źródła:
Dokumentacja modułu XBee 3 RF: https://www.digi.com/resources/documentation/digidocs/pdfs/90001543.pdf