aRMoRS - Robotic Medical Rescue Squad
to projekt realizowany przez członków Studenckiego Koła Naukowego .NET Politechnika Łódzka, którego celem jest opracowanie i wykonanie zestawu wielofunkcyjnych robotów modularnych wraz z panelem sterowania. Będą one wspierać służby ratownicze w działaniach na miejscach wypadków i katastrof. Ich zadaniem będzie m.in. lokalizacja i identyfikacja osób poszkodowanych w trudno dostępnych lub niebezpiecznych dla ratownika miejscach, monitorowanie ich stanu zdrowia, oraz transport, z dodatkową funkcjonalnością podtrzymywania ciężkich przedmiotów lub elementów konstrukcji.
Początkowo w ramach projektu powstają dwie grupy robotów. Pierwsza grupa będzie składać się z robotów wizyjnych będących heksapodami. Roboty te będą napędzane 6 mechanicznymi nóżkami z włókna węglowego, wykonanych w technologii druku 3D, o 3 stopniach swobody, pozwalającymi na udźwig do 5kg masy, sterowanych za pomocą opracowanego przez nasz zespół modułu komunikacyjnego połączonego z komputerem Nvidia Jetson na pokładzie. Dodatkowym zadaniem układu będzie realizacja wszelkich obliczeń związanych z procesem douczania robota, istotnego dla autonomicznego trybu sterowania zestawem robotów. Każdy robot z tej grupy wyposażony będzie w kamerę ZED2, kamerę termowizyjną oraz liczne czujniki m.in. czujniki odległości, tlenku węgla, metanu i CO2, temperatury oraz barometr. Zadaniem tej grupy będzie mapowanie terenu akcji, identyfikacja potencjalnych zagrożeń dla robotów i ratowników, poszukiwanie i identyfikacja potencjalnych ofiar oraz w przyszłości kontakt z nimi przy pomocy planowanego modułu do komunikacji z poszkodowanymi. Dzięki możliwie najmniejszym rozmiarom roboty z pierwszej grupy umożliwiać będą dotarcie do miejsc niedostępnych dla ratownika. Wśród zadań tych robotów można również wyróżnić zarządzanie siecią komunikacyjną zestawu, dzięki czemu zapewniona będzie stałą łączność obsługującego panel sterowania ratownika z robotami.
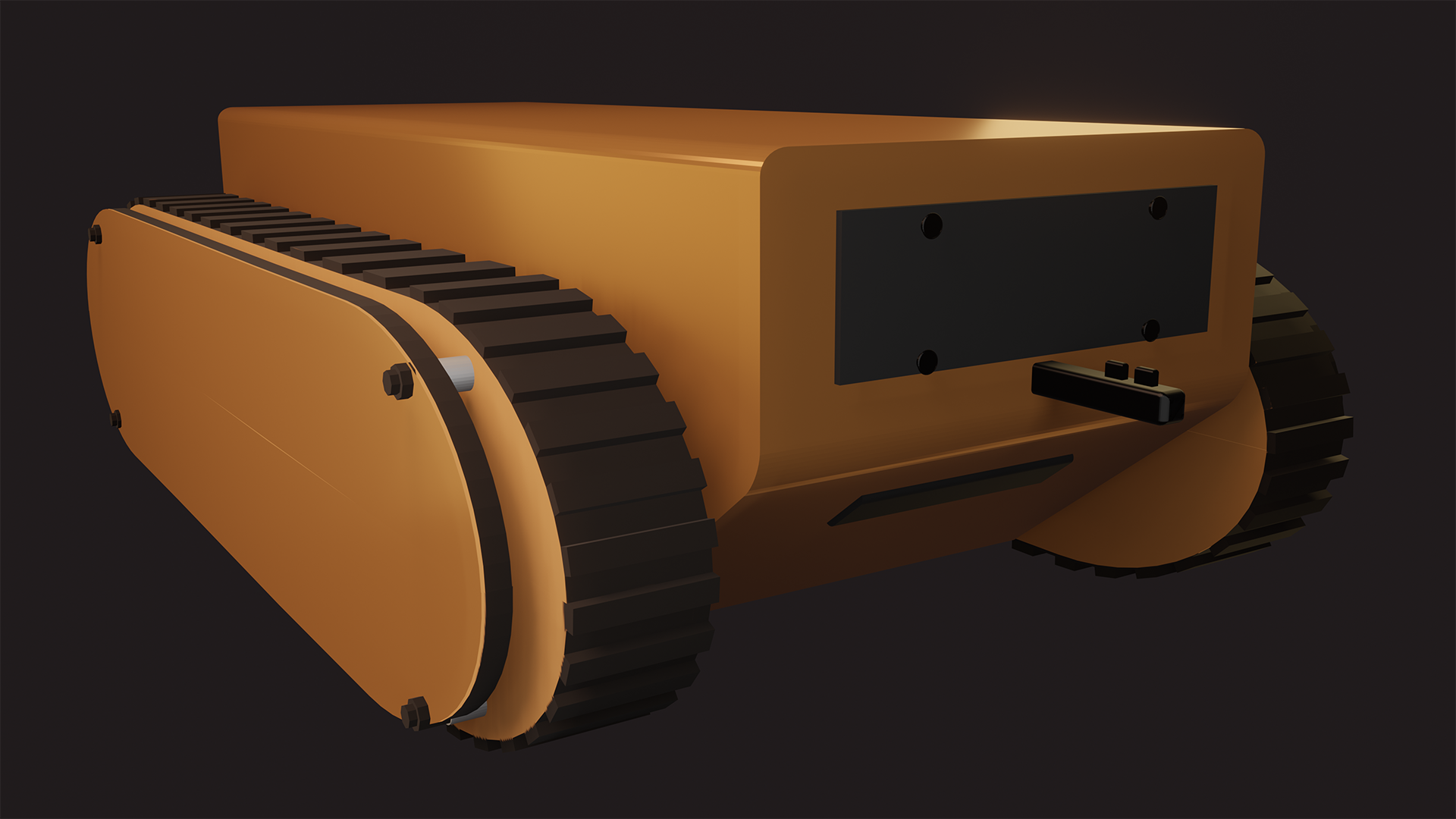
Druga grupa robotów będzie składać się z robotów z gąsienicowym układem bieżnym. Będą one przystosowane do przenoszenia większych ciężarów m.in. osób poszkodowanych w wypadkach, co bezpośrednio umożliwi ich konstrukcja. Roboty z drugiej grupy będą mogły łączyć się ze sobą w pionie i poziomie, co umożliwi zestawowi na realizację nietypowych dla obecnie produkowanych robotów mobilnych zadań, m.in. przewożenie noszy i innych potrzebnych w trakcie akcji elementów na platformie jezdnej oraz podtrzymywanie elementów konstrukcji.
Prototypy oraz ich funkcjonalność są szeroko konsultowane, ponadto Prowadzimy konsultacje ze środowiskiem akademickim oraz wśród pracowników służb ratunkowych. Po początkowych konsultacjach projekt rozumiany jest jako potrzebny, a dalsza współpraca pozwoli nam na m.in. zbadanie funkcyjności interfejsu panelu sterowania i opracowywanych rozwiązań. aRMoRS to rozbudowany projekt, który może być rozwijany przez wiele lat. Stanowi bazę do powstania wielu prac dyplomowych oraz publikacji naukowych, szczególnie z zakresu automatyki i teorii sterowania robotów, sztucznej inteligencji, rozpoznawania obrazów oraz konstrukcji maszyn. Dalsze działania nad projektem zakładają wykonanie prac badawczych w kierunku wypracowanych algorytmów sterowania robotów, jak również konstrukcji układów napędowych. Dodatkowo analizie zostaną poddane parametry takie jak: wytrzymałość na obciążenia czy uszkodzenia mechanicznie, efektywność mechanizmów ruchowych, zakres i jakość komunikacji, skuteczność systemu sterowania oraz ogólne funkcjonowanie oprogramowania. Parametry te poddamy również badaniom laboratoryjnym i polowym, dzięki którym będziemy mogli opracować bezpieczne rozwiązanie, służące społeczeństwu. Realizowane prace prowadzić będą do opracowania artykułów w dyscyplinach automatyka, elektronika i elektrotechnika oraz informatyka techniczna i telekomunikacja.
Dotychczasowe prace zespołu pozwoliły na opracowanie konstrukcji robotów, panelu sterowania i stacji ładującej roboty, przygotowanie prototypu interfejsu panelu sterowania oraz zaprojektowanie modułu komunikacji robotów. Opracowana została również pierwsza wizualizacja robotów oraz wstępne projekty elementów do wydruku w technologii 3D. Prace grupy skupiły się również na zaprojektowaniu robotów pod kątem elektroniki. W trakcie opracowania są również algorytmy detekcji obiektów i sterowania robotami, które testowane początkowo będą na opracowanych w programie Matlab Simulink modelach układów sterowania. Dalsze nasze działania wymagają zakupu wymienionych w tym preliminarzu elementów elektronicznych i materiałów do druku 3D.
Dodatkowo po zakończeniu obecnie planowanych działań projekt zakłada poszerzenie zestawu m.in. o opracowanie drona, pełniącego funkcje robota z pierwszej grupy, jak również wzbogacenie robotów pierwszej grupy o moduł komunikacyjny z poszkodowanymi i ratownikami. Planujemy również współpracę ze środowiskiem gospodarczym w regionie łódzkim, która pozwoli nam na dalszy rozwój projektu.
Obecnie nad projektem pracuje blisko 40-osobowy zespół zrzeszający studentki i studentów z wielu wydziałów Politechniki Łódzkiej. Mimo rozpoczęcia projektu w formie zdalnej udało się nam zbudować bardzo silny i zgrany team. W związku z dużym zainteresowaniem tematyką projektu poczynania zespołu i postępy prac można obserwować na naszych mediach społecznościowych, na których dzięki zaangażowaniu środowiska studenckiego osiągnęliśmy już zasięgi ponad 10 tysięcy odbiorców pod naszymi postami:
- Facebook: @TULaRMoRS
- Twitter: @aRMoRS_TUL
oraz w innych mediach m.in. w Studenckim Radio ŻAK, Lokalny Coworking, w których chętnie udzielamy wywiadów i dzielimy się swoimi poczynaniami, zachęcając innych do współpracy.